跨領域的啟發:引領師生向洋航行
一、海洋特色研究計畫
臺灣四面環海,擁有豐富的海洋資源,但受傳統觀念影響,民眾普遍對海洋缺乏認識,導致海
洋相關學術研究僅限於少數系所。海洋像是「內太空」,需要跨領域知識的探索。隨著技術進步與
氣候變遷挑戰,海洋科技的發展機遇與需求增加。
國立高雄科技大學(高科大)前身為國立高雄海洋科技大學,已有超過70年的海洋人才培養歷
史。2018年合併後,校長楊慶煜教授推動海洋特色跨校區研究計畫,鼓勵不同領域的師生共同參與
海洋研究,利用校區專業優勢,組成跨領域團隊並促進產學合作。此外,也設立專題研究計畫,鼓
勵學生進行跨校及跨系研究。
二、成果與啟發
高科大透過補助方案引導師生跨域從事海洋科技研發,並根據執行過程中的回饋持續動態調整
。隨著發展,補助方案在不同時期專注於不同研究主題,並從政策層面引導師生配合全球趨勢(如
SDGs)進行海洋科技研發。
2.1 融合、互補與進步
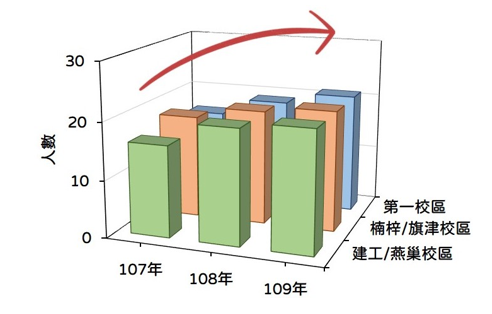
在107年合併初期,以「海洋綠能與環境」、「水產產業創新」、「海洋管理與人文」及「海洋
工程與機電」為主要研究議題,促進不同校區教師的交流。海洋科技發展處協助組建跨專業團隊,
進行相關研究,增進教師間的熟悉感,並啟發對海洋領域的興趣。例如,電機系與造船系教師合作
開發無人自駕電動船,工管系、養殖系及資管系教師則應用3D列印技術於漁業裝置開發。這些合作
推動了創新發展,參與海洋特色研究計畫的教師數量顯著增加,從107年的平均17位上升至109年的
21位。
2.2 傳承與永續
於109年,為延續海洋研究計畫的成果,訂定「海洋特色跨校區亮點傳璽研究計畫補助要點」,扶植績優團隊並鼓勵其帶領新教師參與,以促進互動和知識傳承。在學生方面,新增鼓勵跨校區、跨系所的學生研究團隊獎勵,年扶植至少10個團隊,涵蓋海洋永續、綠色能源等議題,並獲得海洋委員會的優良研究獎,並於國家海洋日時公開表揚。
至111年,隨著合併已四年,校內師生逐漸融合,高科大將計畫轉型為「海洋特色永續發展研究計畫補助方案」,這些補助成功協助多位教師升等並深入海洋科技研究,例如,電機系教師將無線充電技術應用於海洋載具,推動海洋科學的多樣性和發展。

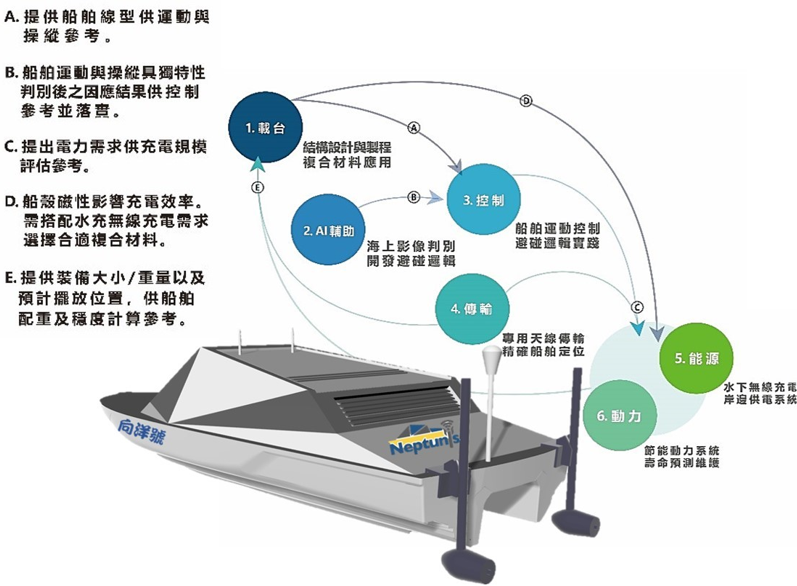
在推動海洋永續計畫補助兩年後,高科大發現教師各自專注於小型研究的議題過於分散。於113年,為因應海上安全與水域巡邏需求,聚焦於開發無人智慧船舶。高科大組建研究團隊,結合造船系、模具系、電訊系等領域教師,從零開始共同開發無人智慧船舶,推進綠能與永續的考量,採用合適的電力系統和水中無線充電技術,實現持續航行的目標,進一步開發出第一艘自製無人智慧船舶「向洋號(Nuptunis)」,其特色如下:
(1) 複合材料應用於載台結構設計
功能性複合材料具有質量輕且耐腐蝕之優點,可提升載具的運動性能並有效降低能耗,在海洋環境中使用不需要擔心保養與腐蝕的問題,因此用來製作無人智慧載具可實現低碳排之目標。向洋號船殼所使用的纖維強化塑膠為非無磁性之複合材料的一種,可以有效消除磁場干擾並維持非接觸式水中充電的效率。
(2) AI演算及影像判別
有鑑於風浪的影響,船舶在海上是屬於3維的運動型態,與自駕車在道路上行駛的2維空間不同,再加上波浪的反光,使得無人船舶在實現自駕過程中需要克服的問題與自駕車極為不同。因此向洋號計畫以海洋環境為基礎,開發適合海上使用之影像判讀技術,透過適當地演算法使無人船舶可即時做出正確的判斷。另外,依據船型與船舶運動姿態之需求,開發了向洋號專屬的避碰判斷邏輯,做為修正船舶運動控制之依據。
(3) 船舶運動與姿態控制及避碰邏輯
因海洋環境外力作用,船舶具有六個自由度之運動變化,且船體排水量、形狀與姿態差異,其船體運動性能與操縱特性大不相同,不易採用陸地載具之運動控制方法來操控目標船舶。故向洋號進行目標船舶之耐海性及操縱性之數值模擬相關試驗,得出目標自主航行船舶之耐海性與操縱性。
(4) 無線通訊與船舶定位
向洋號所搭載的無線通訊與船舶定位天線進行小型化設計,使其可實際應用於將無人智慧船舶所有資訊,正確回傳至控制中心,設計之頻段操作於1200MHz,並將進行輻射特性量測以驗證理論之正確性。此外,向洋號搭載了高效率且低雜訊的無線通訊系統以支援無人智慧船舶的影像訊號傳送,從而提升智慧船舶的性能。
(5) 岸邊型水下無線充電及增程型燃料電池技術
水下無線充電的瓶頸在於海水介電特性比空氣的介電係數值高出多,因此海水會大量吸收電磁波、電磁場等物理能量,導致水下無線取電能量變得非常低。向洋號所搭載的高效率水下無線充電模組與系統以及特殊磁電換能補償模組設計克服了上述問題。另一方面,向洋號所搭載的燃料電池作為將氫能轉化成電能的裝置,在過程中,除了所需的電能外,其他的產物僅為純水與微熱,對環境所造成的影響極小。
(6) 船舶節能動力系統及智慧檢測技術
節能式船舶馬達驅動系統為向洋號的亮點之一,該系統採用智能控制器並應用MPC及深度強化學習等先進控制方法,以最大程度地優化馬達的運行效率。此外,智慧系統鑑別系統用以及即時監控及收集向洋號馬達的運行數據。以訓練神經學習模型,對馬達的壽命進行預測和評估,提前發現潛在問題。

三、亮眼成果與未來展望
3.1 研發成果
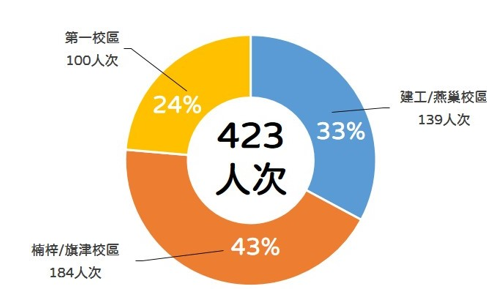
高科大透過系列研究型計畫,成功促進校區間的跨領域合作,從107年至113年,共有423位教師與699位學生參與,拓展了學術視野與實踐經驗,深化了學術交流。自108年至112年,研究團隊獲得教育部及國科會計畫資助1億6,077萬元,並與海洋產業互動,進行產學合作及技術服務達1億1,752萬元。團隊在學術表現方面也頗為亮眼,共發表356篇SCI或TOP 20%期刊論文,展示了高科大在海洋科學與工程技術領域的重要貢獻,提升了學校的學術認可度。同時,本校研究團隊積極與海洋產業進行密切互動,深入了解該產業對技術的具體需求,並根據需求開展外部產學合作及技術服務專案。這些合作不僅幫助企業提升技術能力,還進一步強化了學校與業界的聯繫,所創造的產學合作與技術服務案件總金額達1億4,438萬元,顯示了高科大在技術轉移與實務應用方面的強大能力。
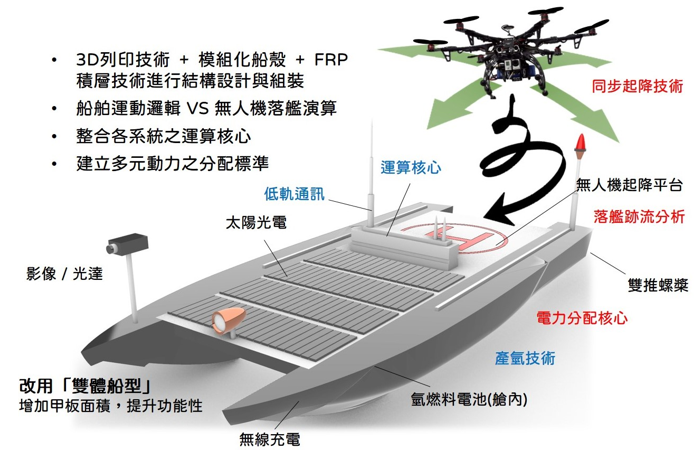
3.2 未來展望-新一代智慧雙體船舶
未來,高科大計畫研發一艘可搭載無人機的雙體船舶,這項創新結合前沿技術,象徵海洋科技的重要突破。團隊將運用3D列印技術快速製作船舶部件,並採用模組化設計,提升結構靈活性及便於維修。此外,利用纖維強化塑膠材料增強船體的穩定性與耐用性。雙體船將採用風能、太陽能、無線充電和氫能等環保動力系統,延長自主航行的時間。智慧系統核心將即時分析航行邏輯,確保無人機安全執行任務,並配備即時影像紀錄系統,提供海上作業的關鍵資料支援。該計畫展現高科大在智慧船舶與綠能技術的創新,助力實現環保、高效的船舶運輸目標。
四、結語
高科大透過跨校區合作與多元研究計畫,成功推動跨域研究,讓海洋元素在校內擴散。學校不僅在學術成果與產學合作上取得顯著成就,更注重引導學生之間的合作與互動。透過一系列的專案,鼓勵學生跨領域合作,進而提升其研究能力和團隊合作精神。
未來,學校將繼續深化跨領域合作,特別是在智慧雙體船計畫中,將引導學生與教師共同參與,發揮創意,邊學邊做,培養能夠解決實際問題的能力。高科大希望藉此不僅培養學生的學術才能,更能激發其創新思維,將理論知識轉化為實際應用,為智慧海洋技術的發展貢獻力量。